AdaptiveFly
A bio-congruent embodied 3D flight technique. Instead of fixing the coupling between head rotation and yaw control, AdaptiveFly dynamically adjusts it based on flight speed — supporting both free visual exploration and intuitive steering.
— Overview
Existing 3D flight techniques in VR force a tradeoff: tight head-yaw coupling makes steering responsive but blocks free observation, while weak coupling supports observation but makes navigation feel sluggish. AdaptiveFly removes this tradeoff by making the coupling itself adaptive to context.
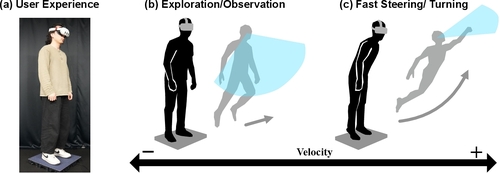
Drawing on how humans naturally adjust gaze-head-body coordination when moving, AdaptiveFly weakens the head-to-yaw coupling at low speeds — so the user is free to look around — and strengthens it at high speeds — so steering remains precise and intuitive.
— Approach
The control law continuously interpolates between two regimes based on the user's current flight speed. At low speeds, head rotation drives gaze with minimal effect on flight direction, preserving the ability to independently observe the environment. At high speeds, head rotation strongly couples into yaw, giving direct and responsive steering.
The principle is platform-agnostic: the same control law generalizes from virtual avatars to physical aerial robots. We demonstrate this by porting AdaptiveFly to a commercial quadcopter and confirming that the bio-congruent feedback structure transfers without modification.
— Findings
A user study compared AdaptiveFly against fixed-coupling baselines across precision navigation, dynamic efficiency, and independent observation tasks.
AdaptiveFly matched the baselines on precision and efficiency while significantly outperforming them on tasks requiring independent observation and stability. Participants also reported smoother motion quality, a stronger sense of self-location, and reduced cybersickness.
— Authors
Lingrong Kong, Amaury Dechaux, Maika Yoshida, Hirosuke Asahi, Jiayi Xu, Gowrishankar Ganesh, and Masahiko Inami.
Research Center for Advanced Science and Technology (RCAST), The University of Tokyo.
— Links
— BibTeX
@inproceedings{kong2026adaptivefly,
title = {AdaptiveFly: Bio-Congruent Adaptation for Embodied 3D Locomotion},
author = {Kong, Lingrong and Dechaux, Amaury and Yoshida, Maika and Asahi, Hirosuke and Xu, Jiayi and Ganesh, Gowrishankar and Inami, Masahiko},
booktitle = {Proceedings of the Augmented Humans International Conference 2026},
pages = {345--356},
year = {2026},
doi = {10.1145/3795011.3795050}
}